RotorLib FDM for C++ is a complete helicopter modeling and simulation package which allows aerospace engineers and programmers to
- create real-time, faster-than-real-time (batch mode) or slower-than-real-time helicopter simulations
- reconfigure the aerodynamics, mechanical properties and control systems to simulate a certain type of helicopter without programming (e.g. a Bell 206)
- test helicopter design and performance using the fast analysis tools under various conditions (e.g. steady state and dynamic response analysis)
- integrate with flight simulation with a synchronous hassle free C++ API to provide ownship dynamics
WhitepaperDownload whitepaper here.
Customer Applications
Pilot Training Simulations Engineering Simulators Desktop Trainers Hardware-in-the-loop Part Task Trainers Software-in-the-loop Full Mission Simulators Pilot-in-the-loop FAA Certified Simulators Autopilot design Helicopter design UAV System Development
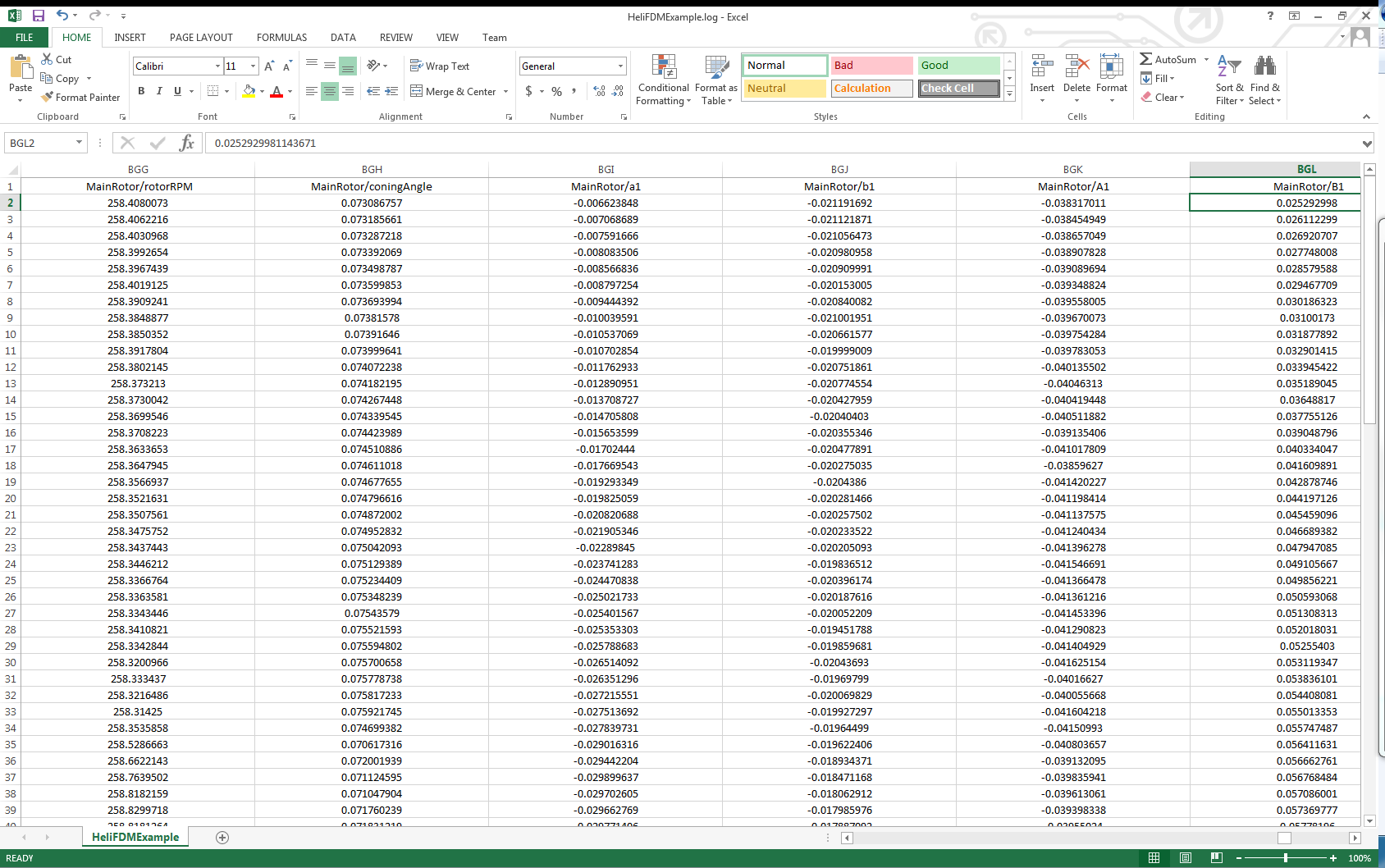
RotorLib FDM Log File
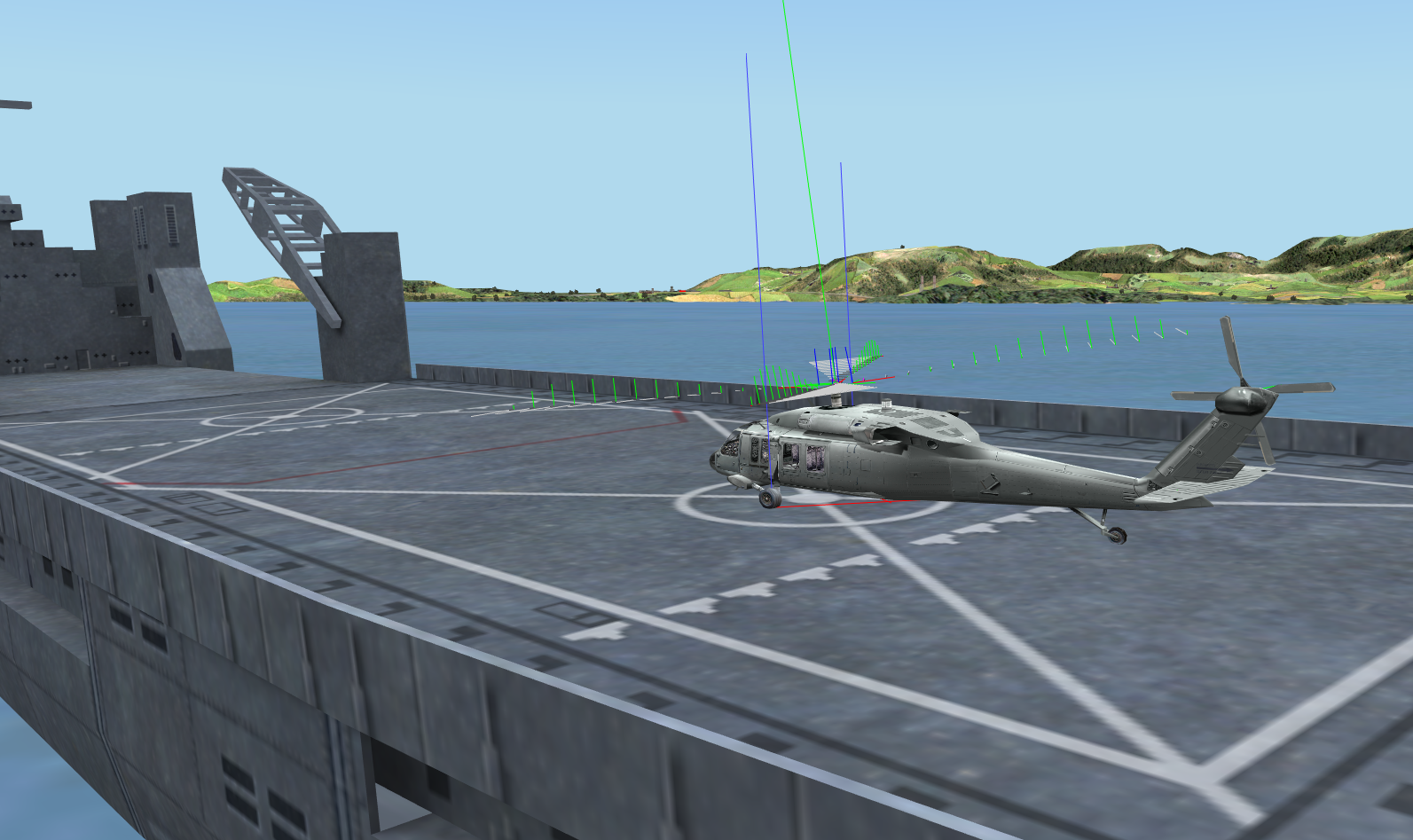
RotorLib FDM Shipdeck Landing
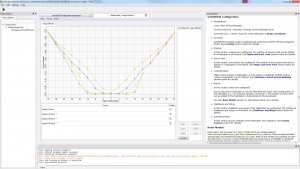
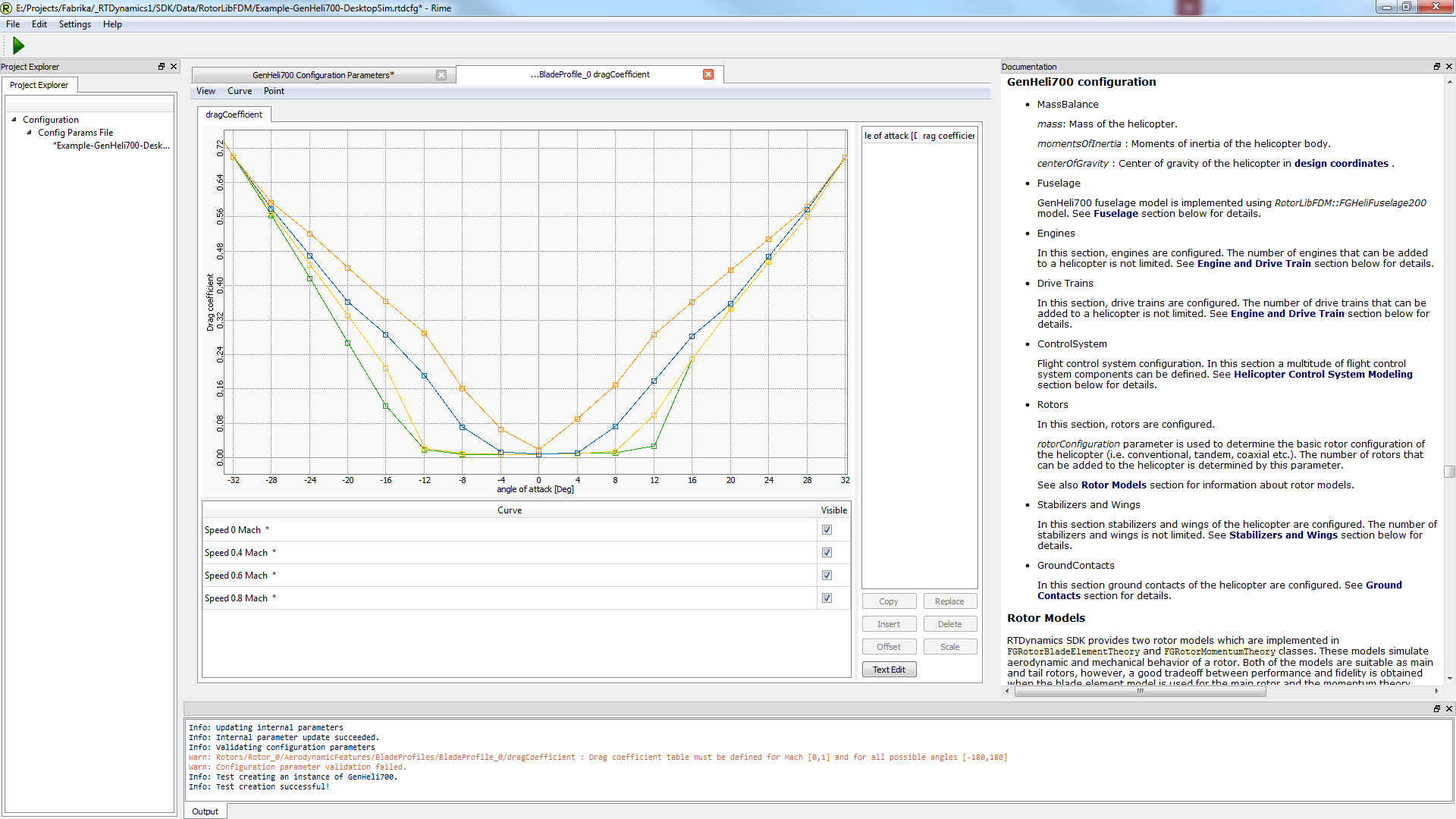
Model Editor (RIME)
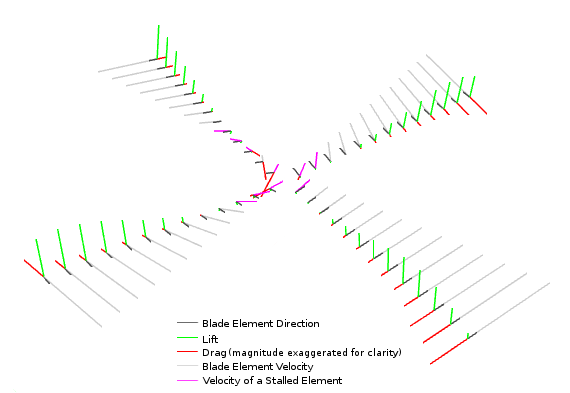
Blade Element Model Rotor View
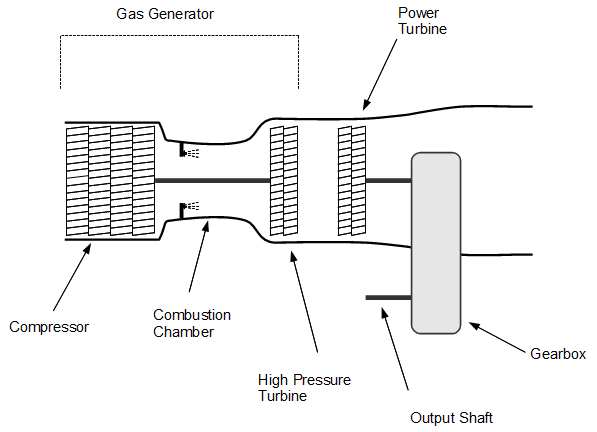
Generic Turbine Engine
Example generic helicopter model
- UH-60 Blackhawk weight class
- Single main and tail rotor configuration with:
- Turbine Engine
- Landing gears (steerable)
- Variable incidence horizontal stabilizer
- Autopilot
- Fuselage
- Vertical stabilizer
Certification Readiness
- Real-time data logging
- Human readable and easy to import tabular text format
- Compact binary format
- Time history data plotting (MATLAB scripts)
Supported configurations
- single main and tail rotor
- tandem
- coaxial
- quadcopter
Normal procedures
- hover (IGE, OGE)
- forward flight
- climb, descend
- steep approach
- coordinated turn
- sideways and backward flight
- taxi
- hovering taxi
- landing
- normal landing
- running landing
- slope landing
- ship deck landing (add-on)
- take off
- normal take-off
- running take-off
- slope take-off
- take-off from ship deck (add-on)
Emergency procedures and malfunctions
- autorotative landing
- vortex ring state recovery
- single and multiple engine failures
- main or tail shaft failure
- stuck undercarriage
- hot start
- stuck tail & main rotor pitch
Simulated aerodynamic effects
- translational tendency
- non-uniform inflow
- translational lift
- asymmetry of lift
- effective translational lift
- compressibility and yawed flow
- ground effect
- vortex ring state (settling with power)
- autorotation
- slung loads effects on helicopter body
- interference effects (main rotor downwash effects on surfaces and tail rotor)
Model Library
- Blade element and Momentum theory rotor models for main and tail rotors
- Weight and balance
- Programmable Generic Control System
- Autopilot (add-on)
- Engine and Drive Train
- Turbine Engine (add-on)
- Constant RPM Engine
- Freewheeling clutch for engine and drive train
- Multiple Engines
- Engine start-up procedures
- Fuselage and Stabilizers
- Ground Interaction, Skids and Wheels
- inclined surface landing/takeoff
- ship deck landing/take off
- Wind and turbulence model
- Slung Loads (add-on)
Design Tools
- Rime and Virtual Flight
Other
- Control loading system interfaces
- C++ Fast Trim API
Electronic Warfare and Weapon Support
- EWAWS weapon and missile loads
- EWAWS onboard RADAR
- EWAWS countermeasures including flares, chaffs, jammers and towed decoys
SDK Simulation Features
All RTDynamics models are part of a single C++ library, this allows developers to use the same SDK to integrate the products into their simulations. Models can also run in the same simulation world, for example all helicopter and aircraft models can carry EWAWS radar models, or can be targets of a EWAWS missiles.
API
- C++ API
- GUI based model editor (RIME)
- Standalone application for flight testing models (Virtual Flight)
- Multi-Platform: 32/64 Bit Windows and Linux.
- Binaries available for all common Visual Studio version and Linux distros.
Simulation Execution and Fidelity
- Real-time, faster than real-time (batch mode) and slower than real-time simulation
- Unlimited number of entities can be simulated with a single license
- Deterministic simulation
- State save and load (a.k.a. state snapshot/restore)
- Real-time simulation data recording
Integration & Visualization
- Easy Integration with
- Image Generators and 3d Visualization Tools
- Control Loading Systems
- Virtual and real cockpit instruments
- 3D Visualization
- Headache-free licensing
Autopilot Model
A complete, reconfigurable autopilot model is available as an add-on. The model contains control system components that can be reconfigured by the developers to simulate the autopilot systems of specific helicopter types.
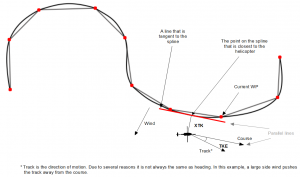
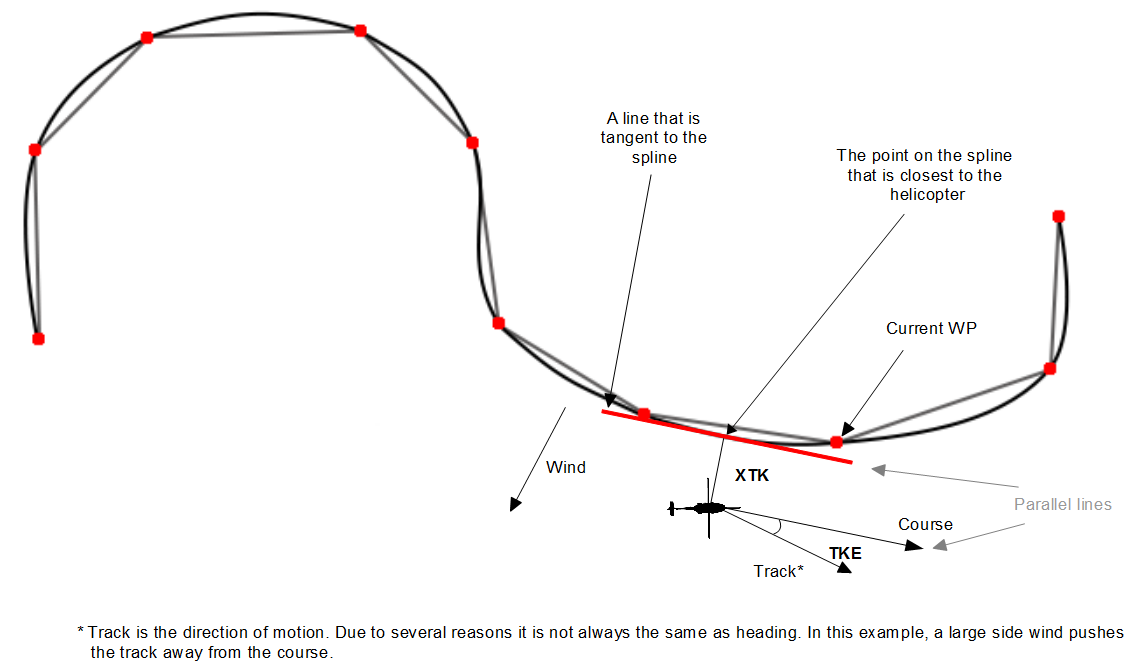
Trajectory follow mode
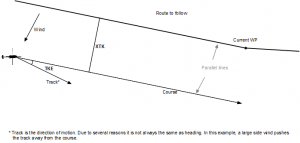
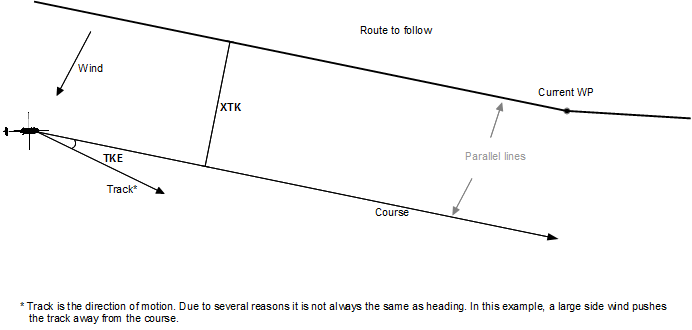
Navigation mode
Autopilot model supports following modes:
- V/S (Vertical speed hold)
- ALT (Altitude hold)
- ALT.A (Altitude acquire and hold)
- SPD (Speed acquire and hold)
- HDG (Heading hold)
- HVR (Hover)
- H.HT (Hover height)
- T.UP (Transition up)
- T.DWN (Transition down)
- NAV (navigation)
- Trajectory Follow
- Turbulence