RTDynamics’ VR-Forces plug-in brings RTDynamics products to VR-Forces and allows users to add high fidelity models to their simulations without programming.
Available products in the plug-in are
FixedWingLib CGF Increases realism for all maneuvers with physics based aircraft entities. Adds new maneuvers such as formation flight, terrain following flight, vertical take off/landing. RotorLib CGF Increases realism for all maneuvers with physics based helicopter entities. Adds new maneuvers such as terrain following, hover, bob-up. EWAWS Allows realistic simulation of RADAR, IR, countermeasures (incl. flare or jammers). Adds physics based missile models to VR-Forces. A dedicated SDK for the plug-in is available for developers who want to build VR-Forces applications.
Physics Based Aircrafts
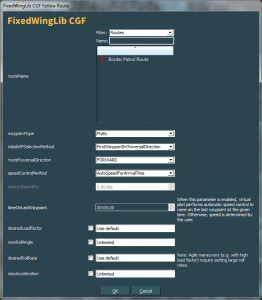
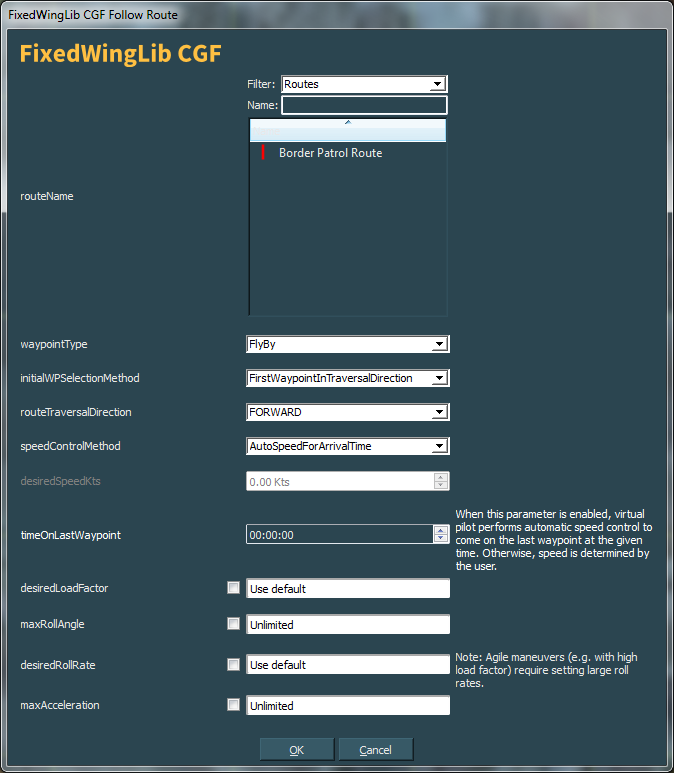
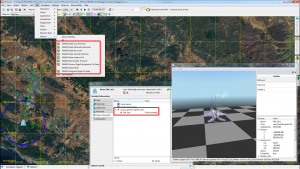
Follow Route Task Dialog
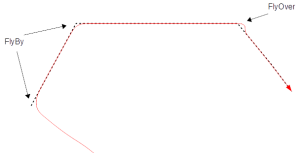
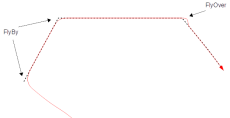
Fly By / Fly Over

Two aircrafts executing engage aerial target task
- Powered by FixedWingLib CGF technology
- Supports all VR-Forces fixed-wing aircraft tasks and set data requests.
- High fidelity flight dynamics for standard VR-Forces tasks
- 6-DOF high fidelity joystick flight
- Additional Tasks
- (New in R14) Advanced Follow Route
- Automatic speed control to arrive the end of the route at a user defined time
- Fly by / fly over waypoints
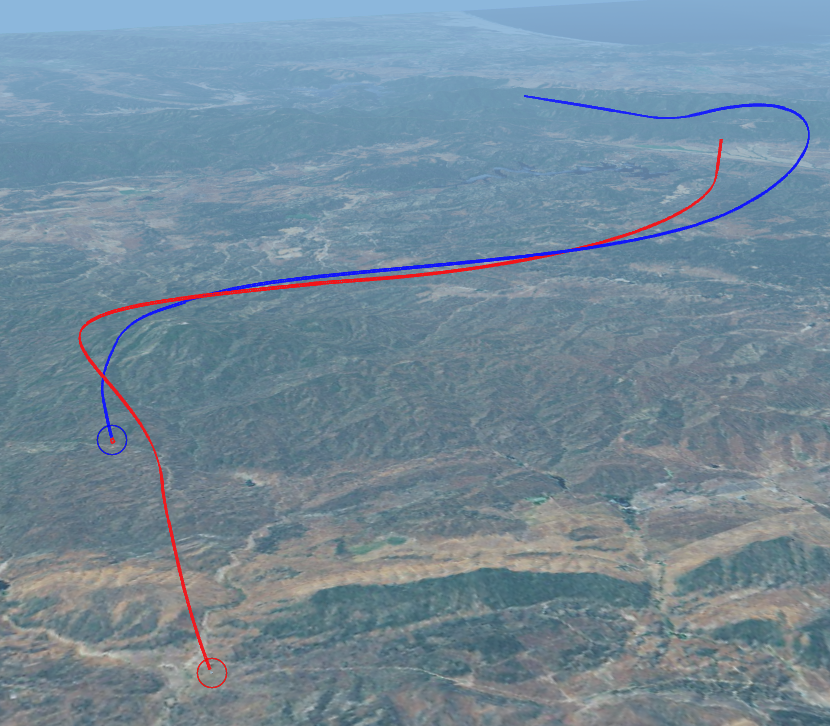
- Crosstrack error control to remain on the defined path
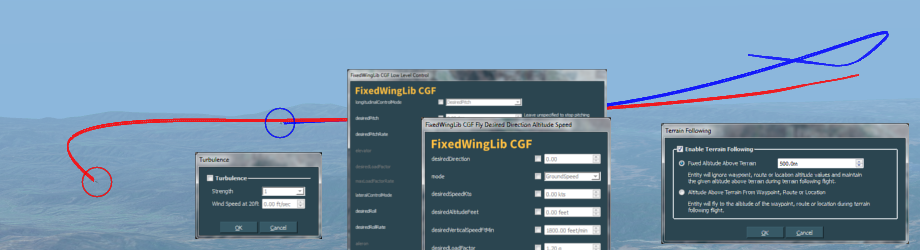
- Low level control
- Velocity vector control
- Direction-altitude-speed control
- Banked coordinated turn
- VTOL takeoff, hover and landing
- Dogfight
- All tasks available to VRF Lua scripts
- (New in R14) Advanced Follow Route
- Additional Set Data Requests:
- terrain following
- set common maneuver parameters: load factor, roll rate and vertical climb speed. Allows switching to high-g defensive and offensive maneuvers during engagement.
- wind/turbulence
- FixedWingLib CGF features
- 6 DOF Physics Based Flight Dynamics Models
- Navigational maneuvers
- Joystick flight with direct aileron, elevator, throttle and air brake control
- Extensible controllers to create new maneuvers
- More
- Combat Maneuvers Library features
- Air combat maneuvers (such as S-turn, Scissors, Low and High Yoyo and more)
- Smart virtual fighter pilot
- (New in R14) Detect and engage enemies automatically
- (New in R14) Missile evasion
- Close range engagement (dogfight)
- More
Physics Based Helicopters
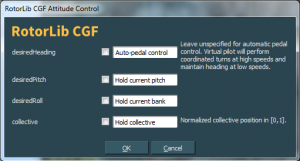
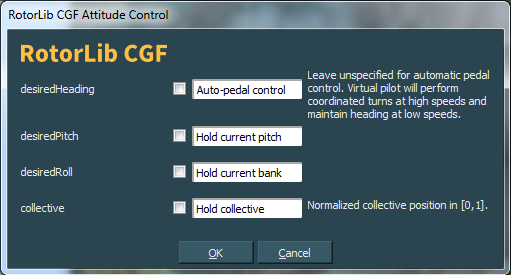
Attitude Control Task Dialog

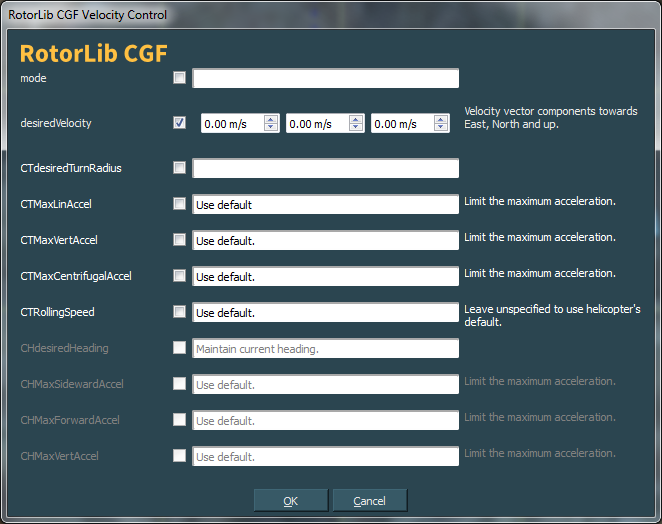
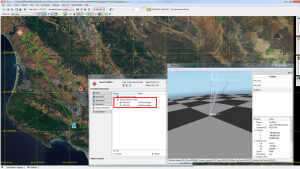
Velocity Control Task Dialog
- Powered by RotorLib CGF technology.
- Supports all VR-Forces rotary-wing aircraft tasks and set data requests.
- High fidelity flight dynamics for standard VR-Forces tasks
- Three different joystick flight models
- Terrain following flight with look-ahead capability
- Additional Tasks
- Attitude control
- Velocity vector control
- Stop and hover
- Additional Set Data Requests:
- terrain following
- RotorLib CGF features
- 6 DOF Physics Based Flight Dynamics Models
- Navigational maneuvers
- Extensible controllers to create new maneuvers
- More
Physics Based Electronic Warfare and Weapon Systems
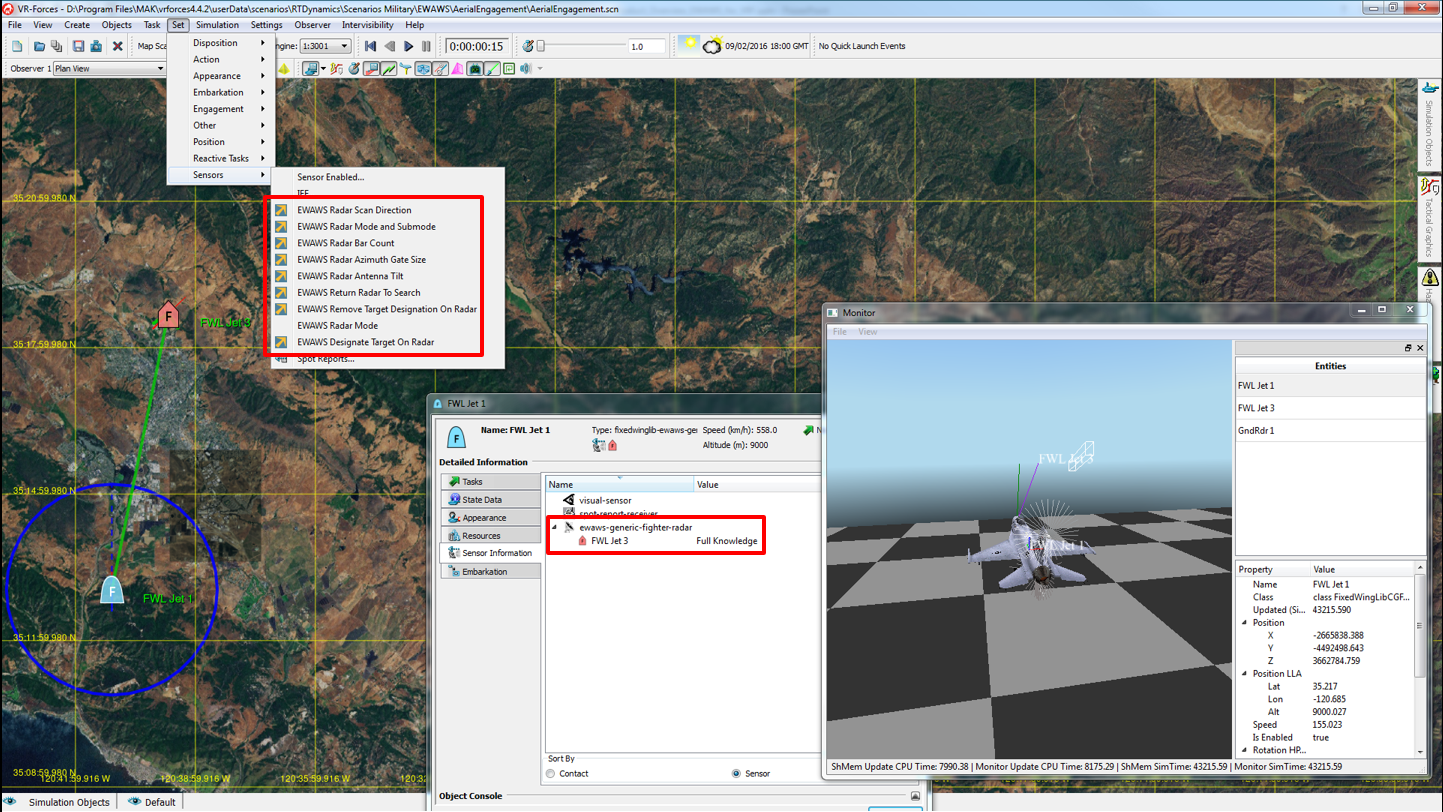
Airborne Targeting Radar
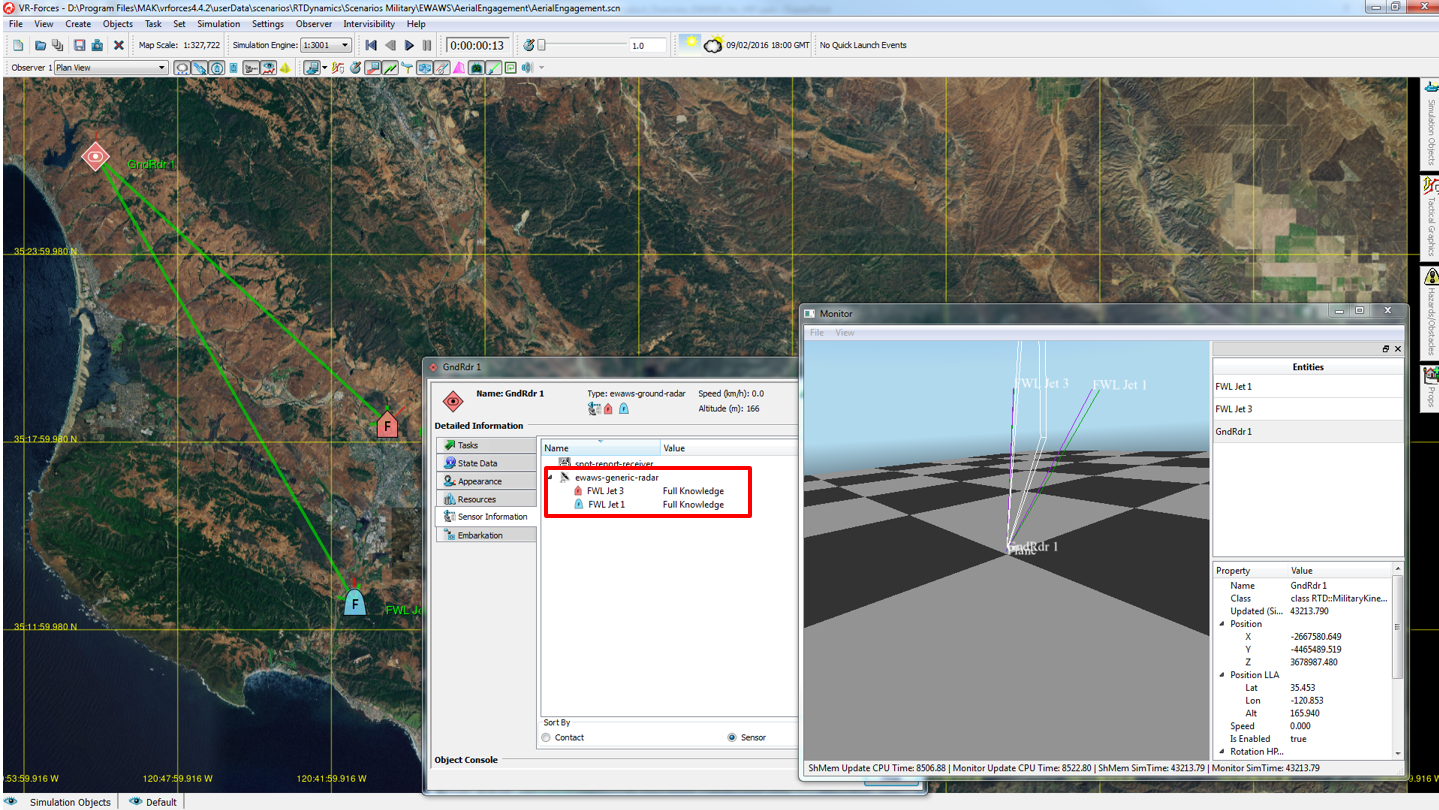
Ground Radar

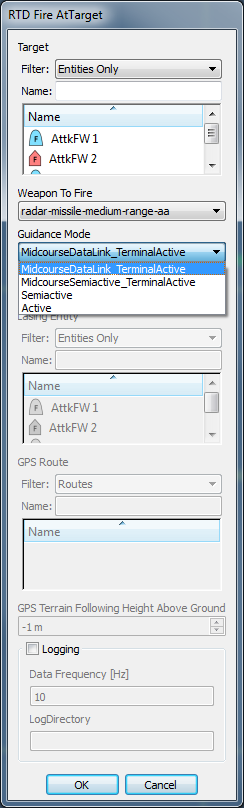
RTD Fire at Target
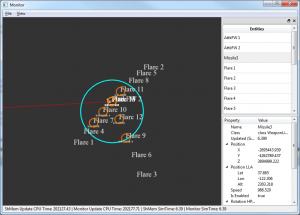
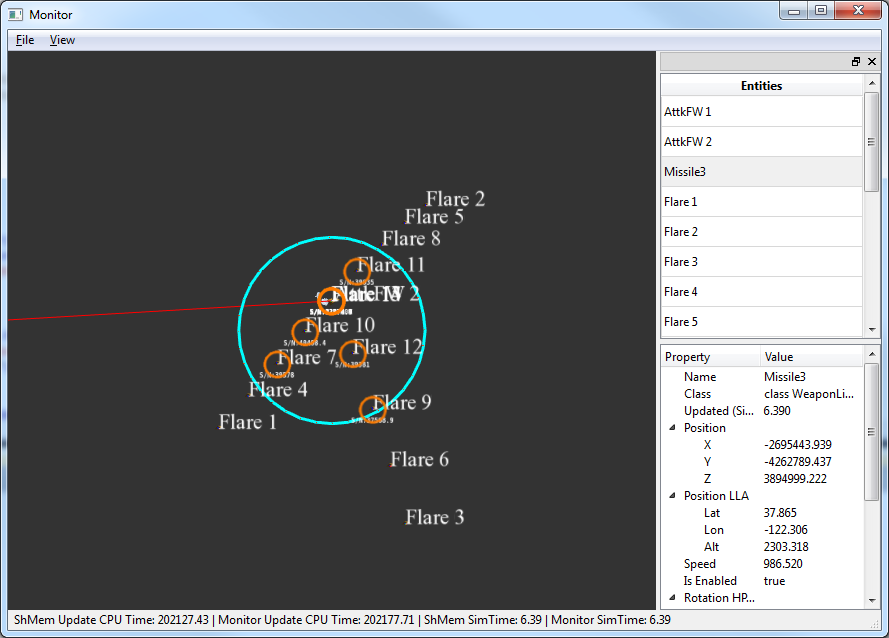
Monitor Sensor View
- Powered by EWAWS technology.
- (New in R14) Radar model integrated as VRF sensor
- Detection list accessible from Plan and Lua scripts.
- Airborne targeting radar
- Raster scan
- TWS, RWS, STT modes
- Ground radar
- Circular and sector scan
- New physics based electronic warfare and weapon system components
- Missile systems
- air to ground cruise missile
- IR guided short range air to air missile
- IR guided short range air to ground missile
- laser guided air to ground missile
- radar guided medium range air to air missile
- radar guided short range air to ground missile
- Countermeasure systems
- chaff
- flare
- towed decoy
- jammers
- DIRCM
- Missile systems
- Modeling capability
- User defined weapon models
- User defined sensor models
- Extensive real-time logging
- “RTD Monitor” to visualize the sensor
world in real-time - Physics based modeling of
- Propagation
- Reflection
- Emission
- Sensors
- Additional Tasks
- Fire at target
- Launch countermeasures
- Extend towed decoy
- Enable Jammer
- Enable DIRCM
- Lase target
- Additional Set Data Requests:
- Countermeasures Auto Launch
- Set Data Logging
- Seeker Data
- (New in R14) Set Radar Mode And Submode
- (New in R14) Set Radar Azimuth Gate Size
- (New in R14) Set Radar Scan Direction
- (New in R14) Set Radar Antenna Tilt
- (New in R14) Set Radar Bar Count
- (New in R14) Designate Target On Radar
- (New in R14) Remove Target Designation
- (New in R14) Return Radar to Search