

RotorLib CGF is C++ library designed for simulation developers who want to add helicopter CGF entities to their simulations. RotorLib CGF allows developers to
- task friendly or opponent helicopter entities to perform high level maneuvers like route following, attack, takeoff and landing
- provide instructors to take control of a CGF helicopter and fly around with a gamepad or joystick
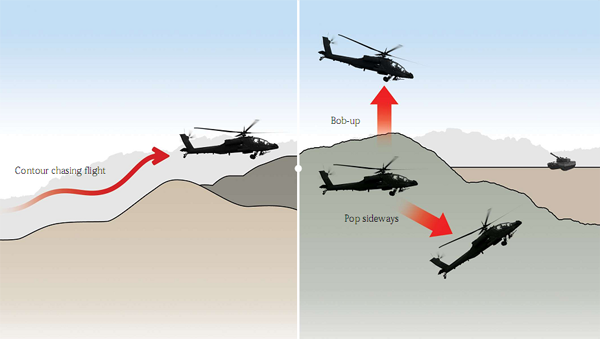
- utilize a number of low levels tasks such velocity hold to create new maneuvers such as bob-up
- create complex mission rules for helicopters
RotorLib CGF is available as a C++ SDK and plug-in for MAK VR-Forces on Windows and Linux.
WhitepaperDownload whitepaper here.
Customer Applications
Computer Generated Forces Applications Helicopter and ground crew training Battlefield and Urban helicopter operations Marshaling simulator Autonomous wingman Door gunner training Autonomous targets UAV operator training Simulation of autonomous UAV entities Winch operator training Air traffic control simulations
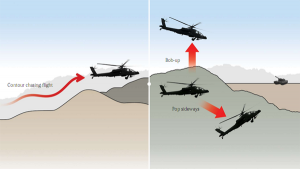
Terrain Following and Bob sideways
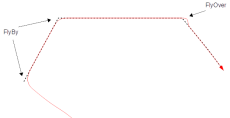
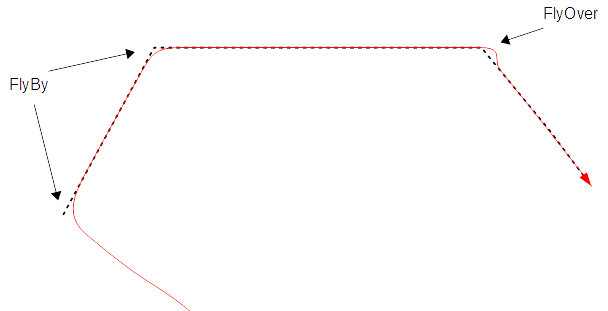
Fly by and Fly Over Waypoints

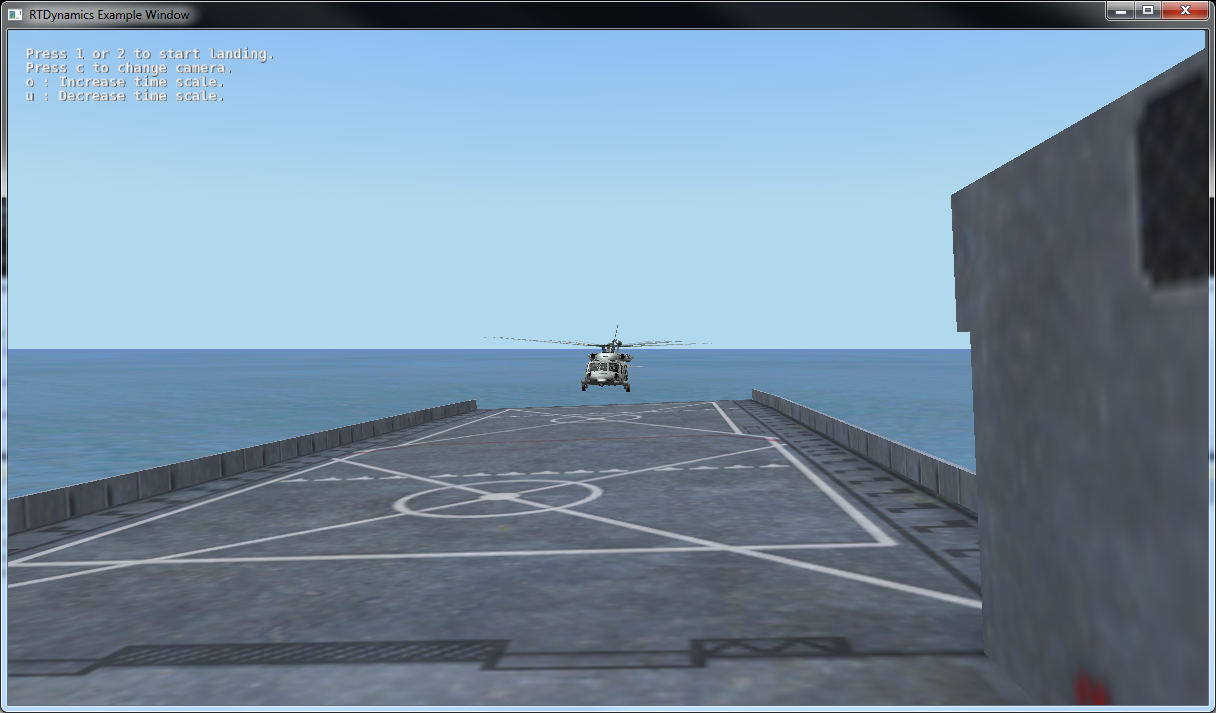
RotorLib CGF Shipdeck Landing

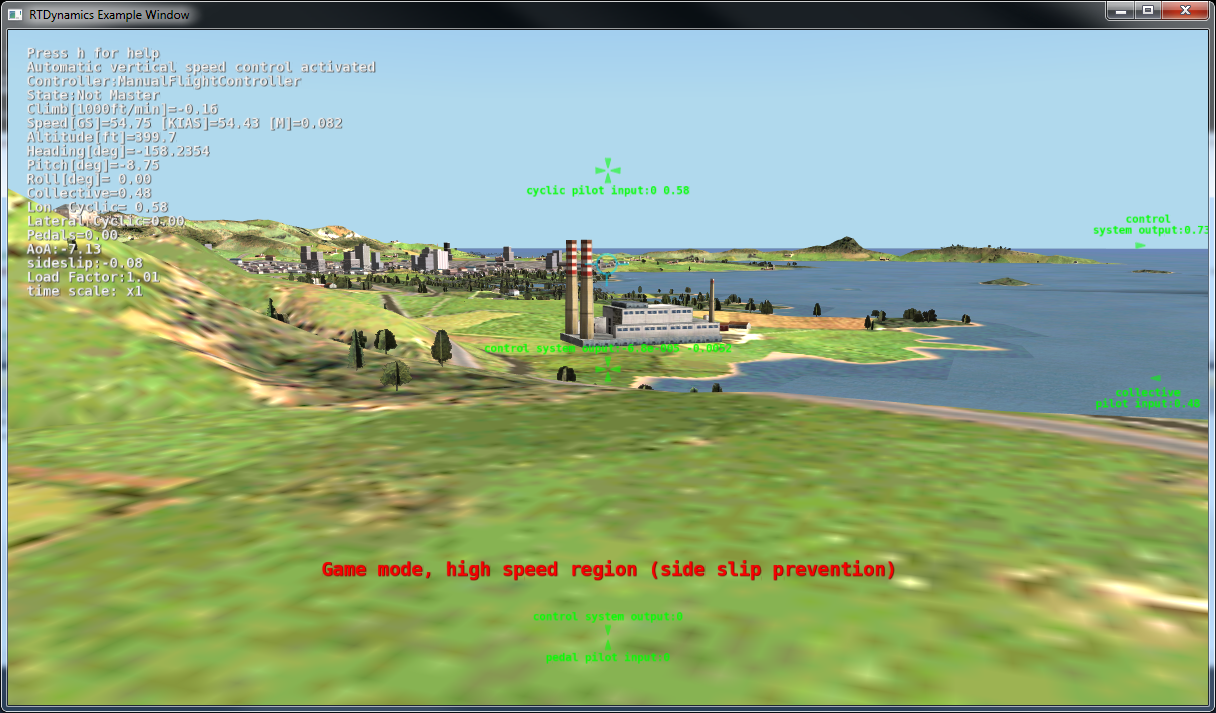
Realistic Manual Flight Modes
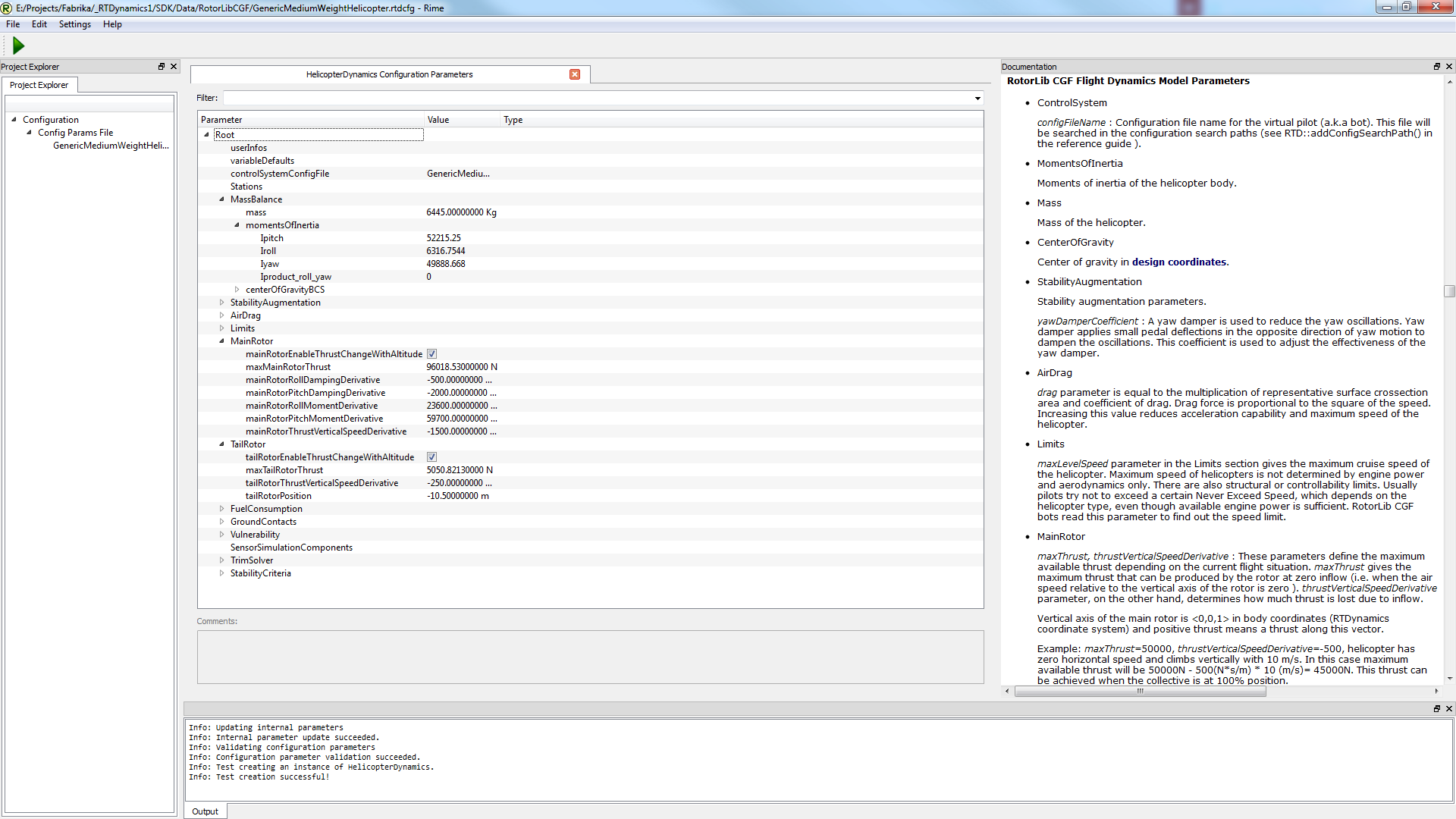
Configuration Editor (RIME)

Virtual Flight
Supported helicopter configurations
- Attack
- Utility
- Cargo
- Quadcopter
- Single main/tail rotor UAV
- Co-axial and tandem
High level tasks
- flying to point (with coordinated turns or user provided heading)
- following a route
- terrain following
- (New in R7) Automatic speed control to arrive waypoints at user defined times
- (New in R7) Fly by/Fly Over waypoints
- (New in R7) Crosstrack error control to remain on the path
- landing to a user defined point
- landing to ship deck
- joystick flight
- reaching and holding a user provided velocity vector
- holding a user defined attitude
- coming to a hover (from any initial state)
- slung load flying (add-on)
- ship deck landing and takeoff (add-on)
- formation flight (add-on)
- terrain following flight
Low level tasks (combine to create new high level tasks):
- Fly with given velocity vector
- Fly with given heading and attitude
Realistic manual flight modes
- Game mode (very easy manual flight)
- Attitude and heading hold (helicopter with advanced SAS)
- Direct mode (helicopter with rudimentary SAS)
Physics
- 6DOF physics model
- Ground interaction
- steering
- rolling
- braking
- landing gear suspension
- Slung loads (add-on)
- Inclined surface landing
- Ship deck landing (add on)
Design Tools
- (New in R7) Rime and Virtual Flight
Other
- (New in R7) Trim (initializing the model in a predefined state)
Electronic Warfare and Weapon Support
- EWAWS weapon and missile loads
- EWAWS onboard RADAR
- EWAWS countermeasures including flares, chaffs, jammers and towed decoys
SDK Simulation Features
All RTDynamics models are part of a single C++ library, this allows developers to use the same SDK to integrate the products into their simulations. Models can also run in the same simulation world, for example all helicopter and aircraft models can carry EWAWS radar models, or can be targets of a EWAWS missiles.
API
- C++ API
- GUI based model editor (RIME)
- Standalone application for flight testing models (Virtual Flight)
- Multi-Platform: 32/64 Bit Windows and Linux.
- Binaries available for all common Visual Studio version and Linux distros.
Simulation Execution and Fidelity
- Real-time, faster than real-time (batch mode) and slower than real-time simulation
- Unlimited number of entities can be simulated with a single license
- Deterministic simulation
- State save and load (a.k.a. state snapshot/restore)
- Real-time simulation data recording
Integration & Visualization
- Easy Integration with
- Image Generators and 3d Visualization Tools
- Control Loading Systems
- Virtual and real cockpit instruments
- 3D Visualization
- Headache-free licensing

The follow entity controller of RotorLib CGF can simulate formation flying including joining formation, holding position in formation and leaving formation.