

FixedWingLib CGF (Computer Generated Forces) is a standalone real-time C++ aircraft dynamics and maneuvers library for flight training devices and simulators.
Developers can use FixedWingLib CGF to simulate fixed-wing aircraft in their mission scenarios. FixedWingLib CGF entities can perform a large number of flight maneuvers autonomously, even complex ones such as air combat maneuvers or VTOL landing on a ship deck. FixedWingLib CGF consists of a generic (parametric) fixed-wing CGF aircraft and a virtual pilot that can perform various maneuvers.
For a flight dynamics model tailored for pilot training purposes (such as for the ownship in a full mission trainer), please see the FixedWingLib FDM product.
FixedWingLib CGF includes generic fighter jet, cargo, VTOL jet and UAV aircraft models. Type specific models are available from RTDynamics either at no charge or with a service contract.The flight dynamics model is a physics based 6-DOF model and maneuvers are performed by controllers. This combination allows highly realistic CGF behaviour which matches the real-world performance characteristics of the aircraft hence significantly increases the fidelity of the simulation results.
WhitepaperDownload whitepaper here.
Built-in Maneuvers
- High Level Controllers
- fly over waypoints (follow a route)
- (New in R7) Automatic speed control to arrive waypoints at user defined times
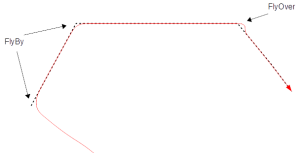
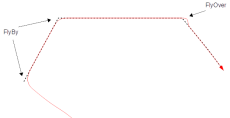
- (New in R7) Fly by/Fly Over waypoints
- (New in R7) Crosstrack error control to remain on the path
- loiter around a point
- fly at a given speed, heading and altitude
- land
- take-off
- fly a race track
- taxi to given position
- taxi over given waypoints
- fly over waypoints (follow a route)
- Low Level Controllers
- fly with a given velocity vector
- fly at the given attitude (roll and pitch), speed, throttle setting and air brake setting
- taxi with given velocity direction
- Task plan and AI ready
- Re-start, cancel maneuvers at runtime
- Change maneuver parameters at runtime
- Virtual pilot handles transitions correctly
- Create new maneuvers
- Use existing maneuvers as building blocks
Manual flight
- take control of an aircraft and fly manually
- CGF entities continue their previous maneuvers once joystick is de-activated
Combat Maneuvers Library Add-on
Air combat
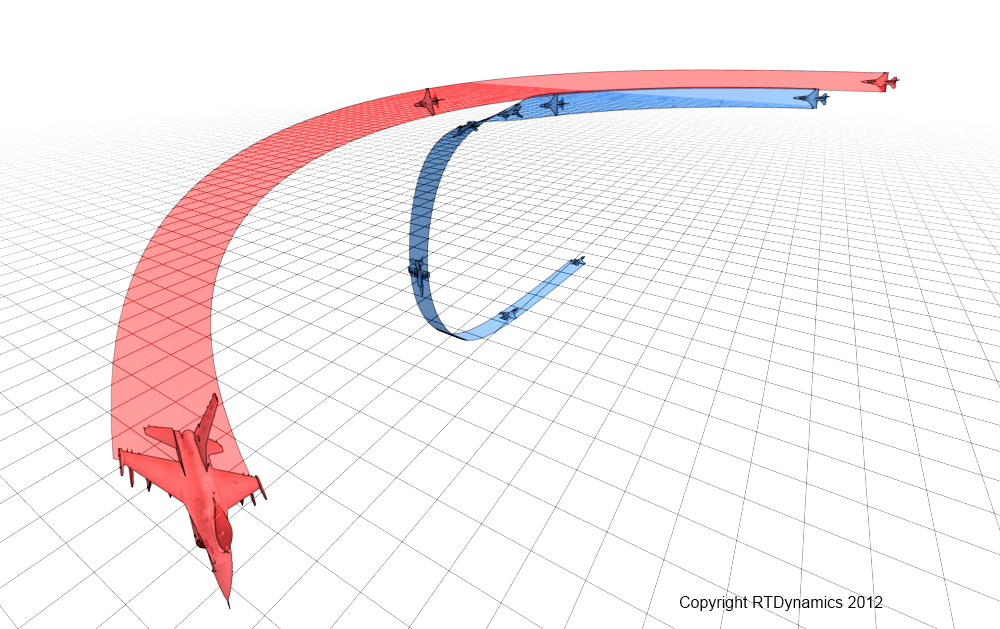
- Hard turn
- Immelmann
- Split-S
- Lead, Lag and Pure Pursuit
- High and Low Speed Gun Jink
- Extension
- Scissor
- High/low yoyo
- Break turn
- Lift Vector Turn
- Head on
- Degree 90
- Barrel roll
Ground Attack
- Dive bombing
Vertical Takeoff and Landing Maneuvers
- VTOL Land
- VTOL take-off
- VTOL fly with a given velocity vector
Terrain following
- terrain contour following flight
- terrain avoidance
Ship deck operations
- Landing on a carrier
- Take off from a carrier
Physics based flight dynamics
6-DOF flight dynamics
- Flat and round earth support
- Ability to match flight performance characteristics of type specific aircraft e.g. an F-16
- Reconfigurability
- Mass, Moments of Inertia
- Weapon Station definitions
- Stability augmentation systems
- Aerodynamics
- Flap settings with varying drag,lift and side force profiles
- Control surfaces
- Roll,pitch rate performance
- Engine
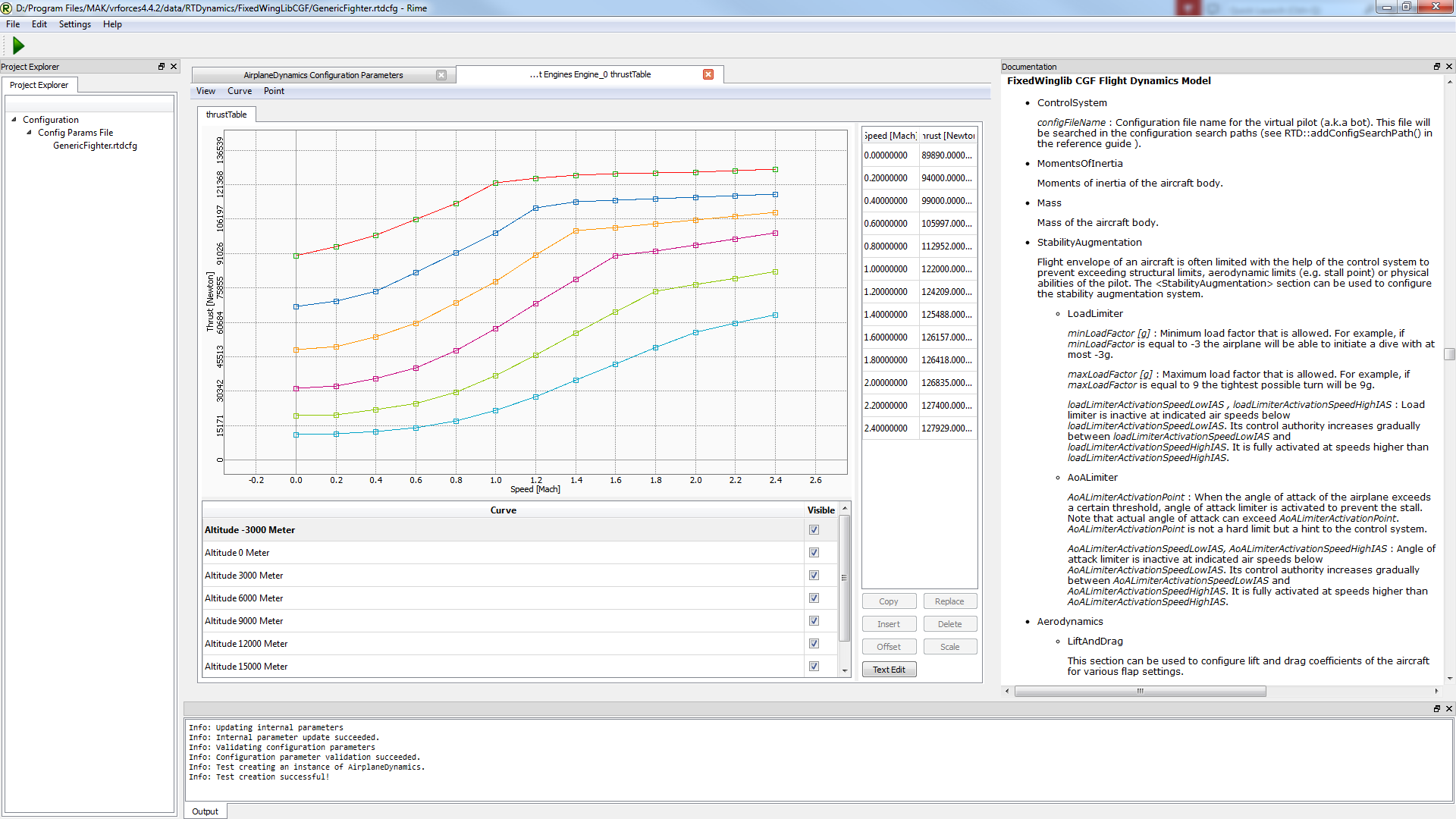
- Table look-up based engine performance modeling
- Landing gears
- aerodynamic drag
- suspension
- wheeling
- damage
- steering controller
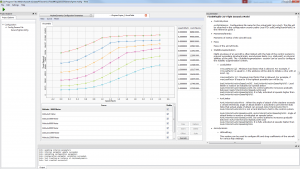
Design Tools
- (New in R7) GUI based configuration editor and a standalone test flight application

Other
- (New in R7) Trim (initializing the model in a predefined state)
Electronic Warfare and Weapon Support
- EWAWS weapon and missile loads
- EWAWS onboard RADAR
- EWAWS countermeasures including flares, chaffs, jammers and towed decoys
SDK Simulation Features
All RTDynamics models are part of a single C++ library, this allows developers to use the same SDK to integrate the products into their simulations. Models can also run in the same simulation world, for example all helicopter and aircraft models can carry EWAWS radar models, or can be targets of a EWAWS missiles.
API
- C++ API
- GUI based model editor (RIME)
- Standalone application for flight testing models (Virtual Flight)
- Multi-Platform: 32/64 Bit Windows and Linux.
- Binaries available for all common Visual Studio version and Linux distros.
Simulation Execution and Fidelity
- Real-time, faster than real-time (batch mode) and slower than real-time simulation
- Unlimited number of entities can be simulated with a single license
- Deterministic simulation
- State save and load (a.k.a. state snapshot/restore)
- Real-time simulation data recording
Integration & Visualization
- Easy Integration with
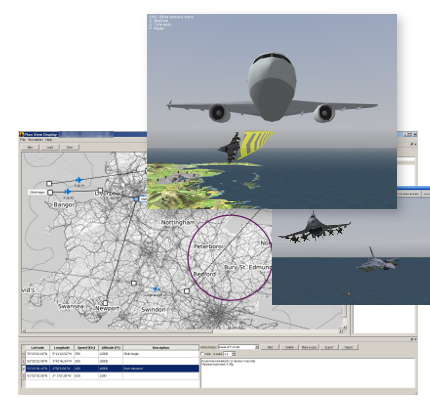
- Image Generators and 3d Visualization Tools
- Control Loading Systems
- Virtual and real cockpit instruments
- 3D Visualization
- Headache-free licensing
- High Level Controllers

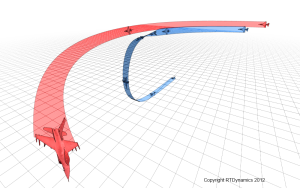
The Formation add-on includes the follow entity controller (FEC) which allows simulation of various formation related maneuvers, such as moving into formation in order and leaving the formation.
Once activated, FEC will fly the aircraft to the desired position in formation and maintain its position. Formation position and other parameters can be changed any time. Aircraft will perform the necessary corrections.
An aircraft can leave formation and perform another maneuver at any time.
Features
- build CGF formations
- move into formation in a certain order
- leave formation
- change formation distance and other parameters at runtime