

EWAWS is a standalone real-time C++ library for radar, electronic warfare and weapon dynamics simulation. It provides ready to use and reconfigurable models for various weapons and EW equipment.
Available models include:
- Weapons
- Guided missiles
- Bombs
- EW Equipment
- Airborne, surface based and naval radars
- IR seeker
- Laser designator and seeker
- Countermeasures (Jammers, chaff, flare etc. )
EWAWS simulation models are physics based and can be reconfigured to simulate type specific equipment and weapons, e.g. AIM-120 with its onboard radar. Models can be built by editing XML configuration files, C++ programming is not necessary.
Applications
- Radar training
- Air traffic control
- Surface (land/sea) radars
- Airborne surveillance (AWACS)
- Pilot training (e.g. mission rehearsal simulators)
- Weapon systems training
- Defensive maneuvering and electronic warfare
- Fighter jet radar operation
- Engineering & research applications
- Weapon systems development
- Analysis of defensive measures in air combat
- EW equipment development
- Weapons
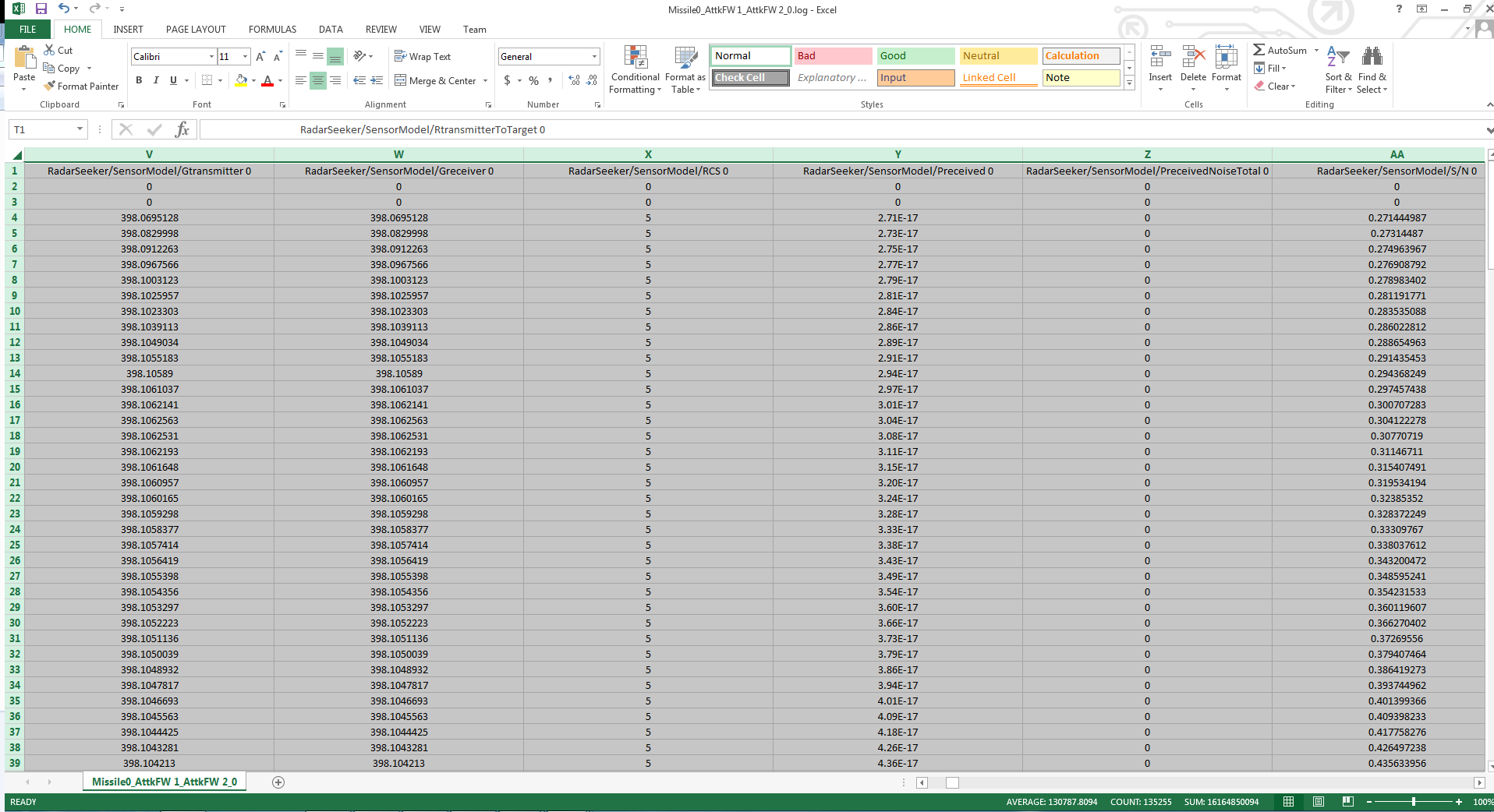
Real-time ASCII Log output

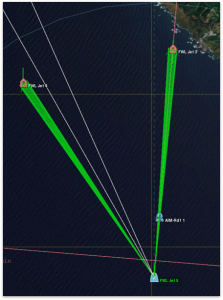
Radar guided semi-active homing
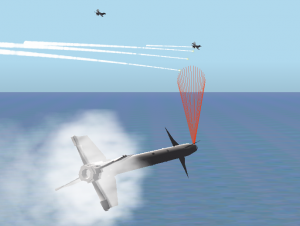
IR Missile Tracking Flares
Sensor simulation components
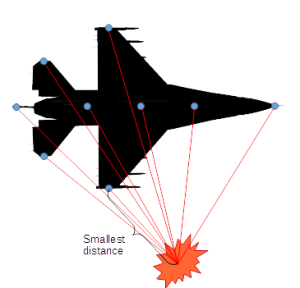
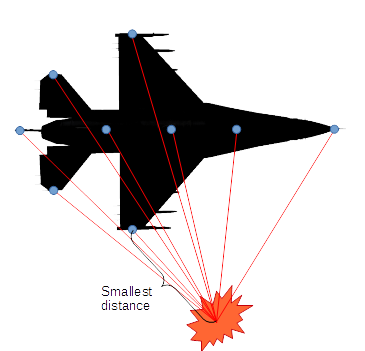
High-fidelity miss distance computation
Type support
- Guided missiles
- Air-to-air
- Air-to-ground
- Surface-to-air
- Cruise (with terrain following flight capability)
- Bombs
- Smart bombs
- Free fall bombs
- Artillery shells (ballistic flight)
- Spin stabilized
- Aerodynamically stabilized
Real time data logging
- Human readable and easy to import tabular text format
- Compact binary format
Design Tools
- (New in R7) GUI based configuration editor
Physics based 6DOF weapon simulation models
- Dynamics
- Lift, drag, side force, supersonic drag
- Control surface model
- Atmosphere model
- Turbine engine and rocket engine models
- Stability augmentation
- Missile guidance models
- Active homing
- Semi-active homing
- Multi-mode guidance
- Midcourse semi-active, terminal active
- Midcourse data link, terminal active
- Fuse and warhead models
- Accurate miss distance calculation
- Geometry of the targets taken into account, i.e. targets are not simple point objects.
- Multiple targets in close vicinity (e.g. aircrafts in formation) supported
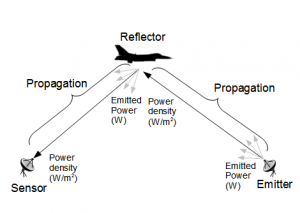
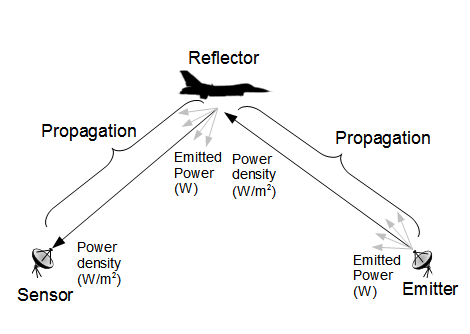
Physics based sensor and countermeasure models
- Radar and radar countermeasure models
- Signal-to-noise computation with radar equation
- 3D antenna gain pattern
- Transmitter power output and waveband taken into account
- Table based 3D radar cross section
- Terrain line-of-sight
- (New in R7) Scan types
- Circular
- Raster
- Sector
- (New in R7) Airborne targeting radar
- RWS,TWS, STT
- Antenna stabilization
- Search region adjustment (azimuth, elevation, azimuth gate etc.)
- (New in R7) Physically based Radar Warning Receiver
- Support for search and tracking modes
- Model outputs can drive different types of radar scopes such as A-scope, B-scope, PPI and RHI
- Towed decoy
- Jammer and chaff
- Signal-to-noise computation with radar equation
- IR seeker and IR countermeasure models
- Signal-to-noise computation based on radiometry principles
- Physical characteristics of sensors (e.g. optical transmittance, field-of-view) taken into account
- Table based IR signature model
- Terrain line-of-sight
- Flare and Directed Infrared Countermeasure models
- Signal-to-noise computation based on radiometry principles
- Laser sensor model
- Signal-to-noise computation based on radiometry principles
- Physical characteristics of sensors (e.g. optical transmittance, field-of-view) taken into account
- Laser designator power output and waveband taken into account
- Table based 3D laser cross section
- Terrain line-of-sight
- Signal-to-noise computation based on radiometry principles
- Missile Approach Warning Sensor model
SDK Simulation Features
All RTDynamics models are part of a single C++ library, this allows developers to use the same SDK to integrate the products into their simulations. Models can also run in the same simulation world, for example all helicopter and aircraft models can carry EWAWS radar models, or can be targets of a EWAWS missiles.
API
- C++ API
- GUI based model editor (RIME)
- Standalone application for flight testing models (Virtual Flight)
- Multi-Platform: 32/64 Bit Windows and Linux.
- Binaries available for all common Visual Studio version and Linux distros.
Simulation Execution and Fidelity
- Real-time, faster than real-time (batch mode) and slower than real-time simulation
- Unlimited number of entities can be simulated with a single license
- Deterministic simulation
- State save and load (a.k.a. state snapshot/restore)
- Real-time simulation data recording
Integration & Visualization
- Easy Integration with
- Image Generators and 3d Visualization Tools
- Control Loading Systems
- Virtual and real cockpit instruments
- 3D Visualization
- Headache-free licensing
- Guided missiles

ESA Add-on allows simulation of electronically scanned array RADAR within EWAWS. When available, this add-on allows users to simulate the following typical functionalities of ESA radars:
- Multiple beams: ESA add-on can generate and control multiple beams simultaneously. This allows for simultaneous tracking and scanning of various areas or targets.
- Mode interleaving: different radar modes, such as air and ground scan, can be active simultaneously.
- Time shared search/track: e.g. while a radar is searching targets it can maintain a dedicated beam on designated targets
- Frequency Agility: Beams generated simultaneously can have different frequencies, pulse repetition frequencies (PRFs), and pulse widths.
Model Configuration and Editing
Configuration parameters for the ESA radar model are stored and edited alongside other model parameters within the RIME (RTDynamics Model Editor). . The “radar mode” and “radar module” concepts in RIME facilitate the modeling of diverse ESA radar capabilities.
VR-Forces Integration & Interoperability
- HLA Data exchange: EWAWS publishes ESA radar beam data to DIS/HLA and can also handle incoming DIS/HLA data related to ESA radar beams.
- VR-Forces Entity Information: The information displayed in the VR-Forces entity information dialog box now includes current beam data generated by the EWAWS ESA radar.
- Task Visualization: The EWAWS task visualization functionality has been extended to support the display of multiple beams.
- Multiple beams: ESA add-on can generate and control multiple beams simultaneously. This allows for simultaneous tracking and scanning of various areas or targets.
LAR GeneratorLAR supports air-to-air, air-to-ground and surface-to-air weapon launches.
Runtime
- launcher speed/altitude
- target range/speed/aspect/bearing/altitude
to the runtime component of LAR, which then returns various data:
- Aerodynamic range, max range, never escape range, minimum range
- A-pole, F-Pole, time to target
Based on returned data, the model can decide when to launch the weapon. Developers can have utilize return data such as Rmax and Rneverescape to drive RADAR scope or HUD.
LAR Generation, Analysis and Reporting
- The resulting weapon configuration and the corresponding offline LAR data can be used directly in VR-Forces or with any application which uses the RTDynamics C++ SDK.
