
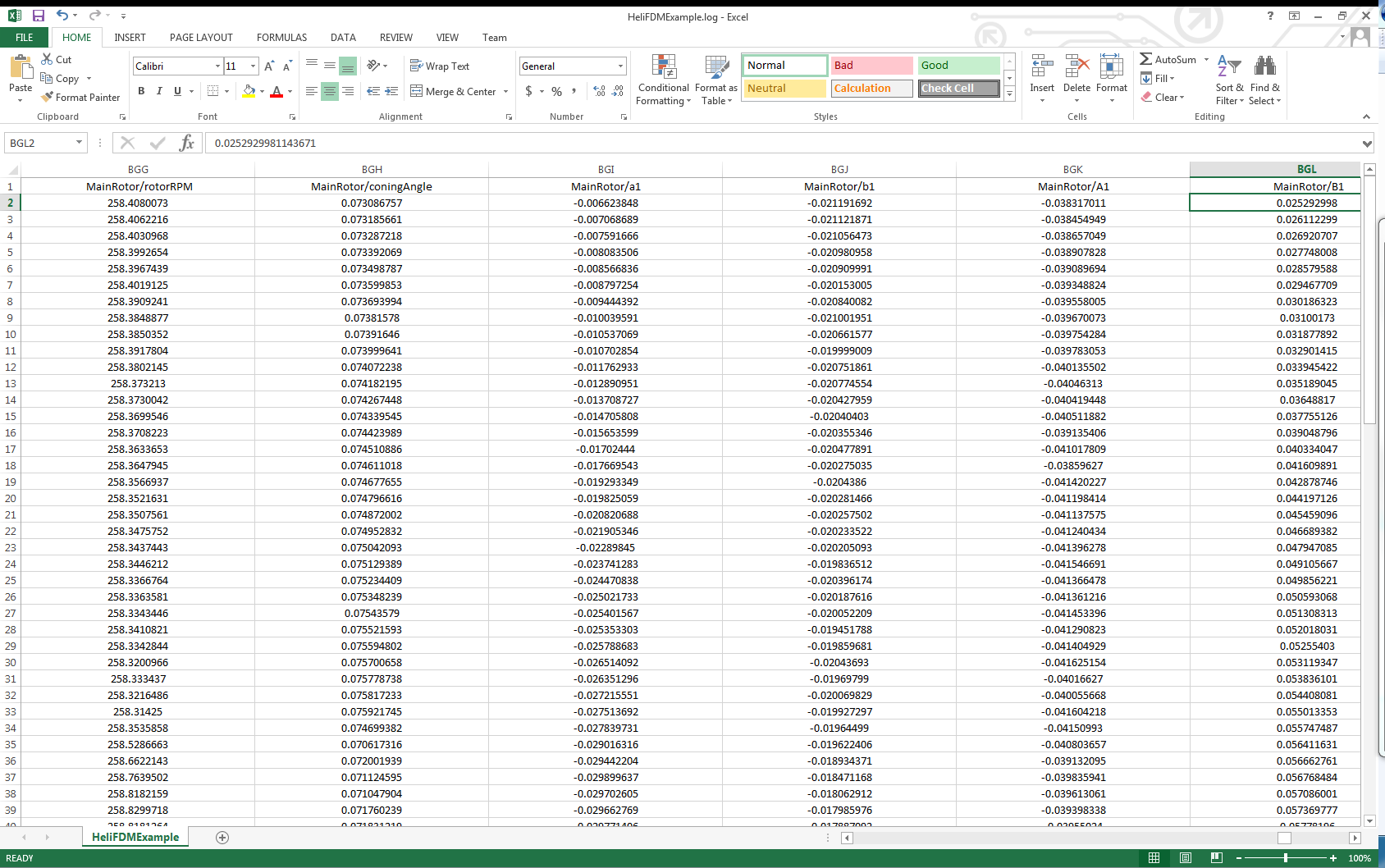
RotorLib FDM Log File
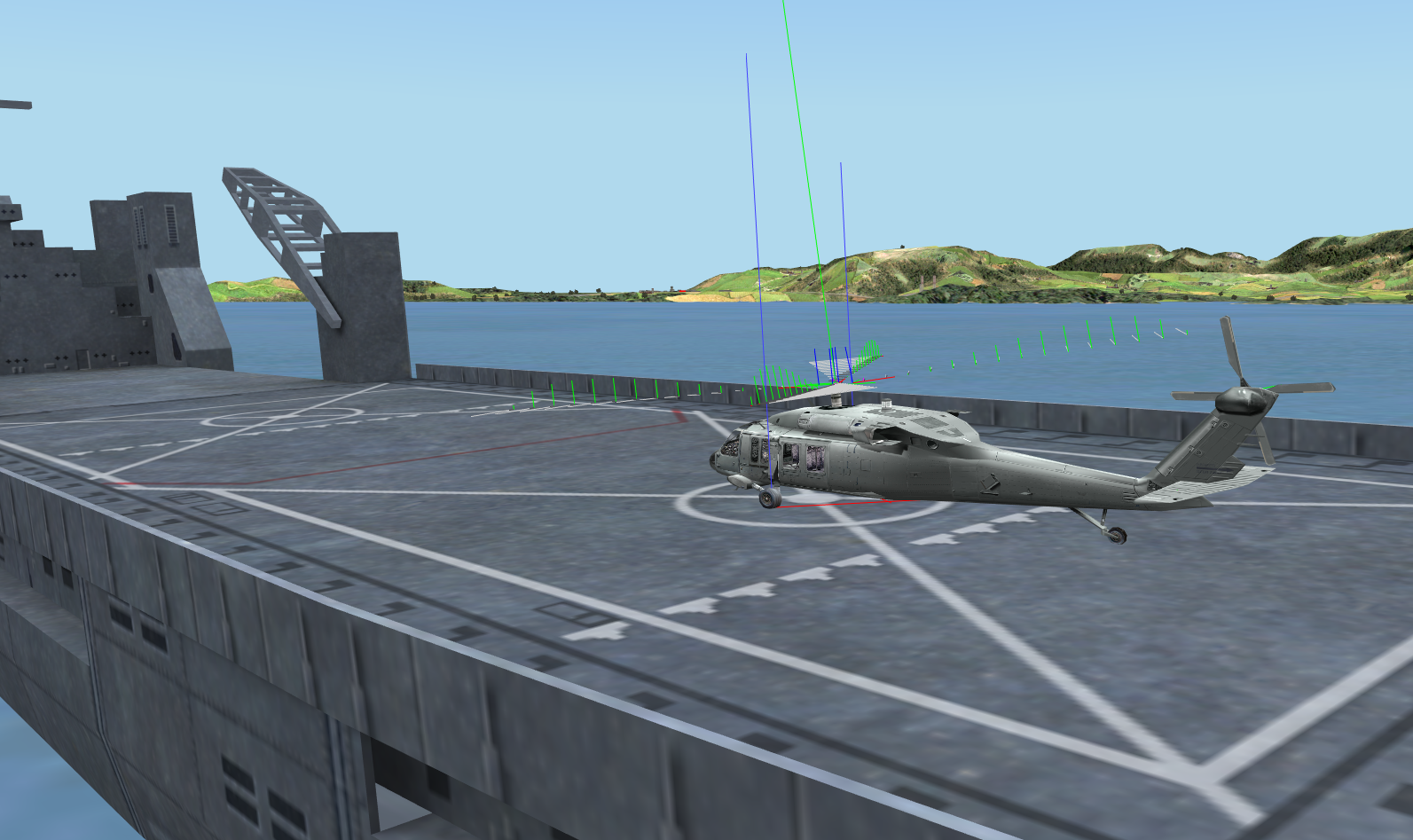
RotorLib FDM Shipdeck Landing
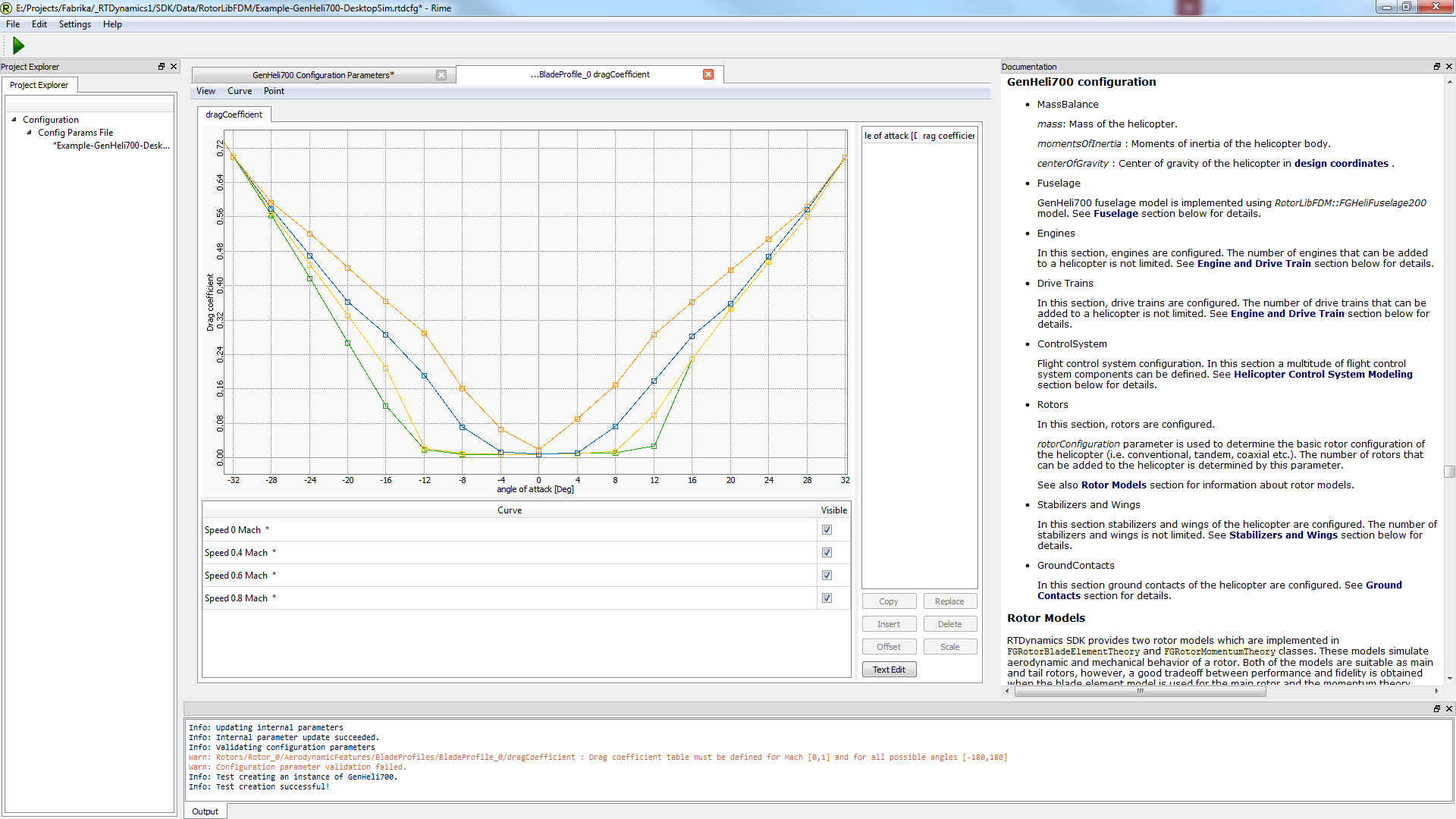
Model Editor (RIME)
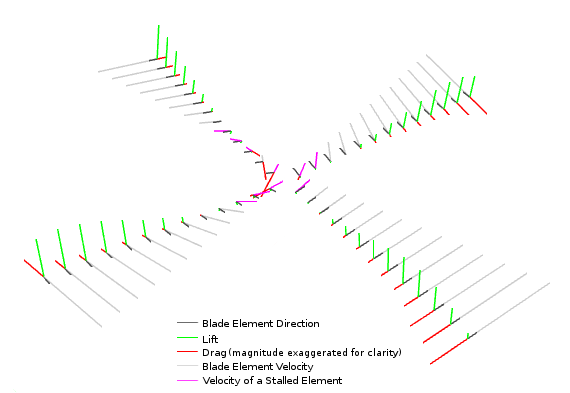
Blade Element Model Rotor View
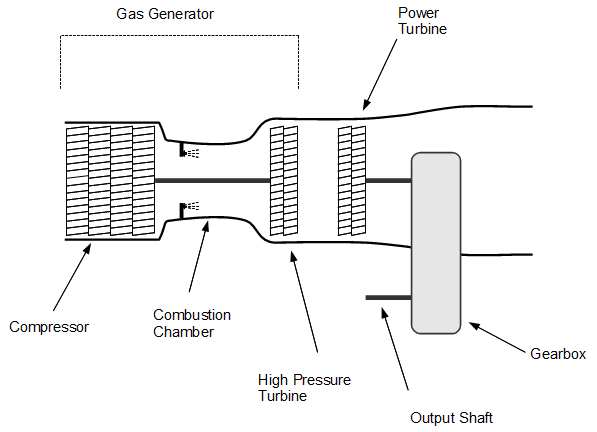
Generic Turbine Engine
Example generic helicopter model
- UH-60 Blackhawk weight class
- Single main and tail rotor configuration with:
- Turbine Engine
- Landing gears (steerable)
- Variable incidence horizontal stabilizer
- Autopilot
- Fuselage
- Vertical stabilizer
Certification Readiness
- Real-time data logging
- Human readable and easy to import tabular text format
- Compact binary format
- Time history data plotting (MATLAB scripts)
Supported configurations
- single main and tail rotor
- tandem
- coaxial
- quadcopter
Normal procedures
- hover (IGE, OGE)
- forward flight
- climb, descend
- steep approach
- coordinated turn
- sideways and backward flight
- taxi
- hovering taxi
- landing
- normal landing
- running landing
- slope landing
- ship deck landing (add-on)
- take off
- normal take-off
- running take-off
- slope take-off
- take-off from ship deck (add-on)
Emergency procedures and malfunctions
- autorotative landing
- vortex ring state recovery
- single and multiple engine failures
- main or tail shaft failure
- stuck undercarriage
- hot start
- stuck tail & main rotor pitch
Simulated aerodynamic effects
- translational tendency
- non-uniform inflow
- translational lift
- asymmetry of lift
- effective translational lift
- compressibility and yawed flow
- ground effect
- vortex ring state (settling with power)
- autorotation
- slung loads effects on helicopter body
- interference effects (main rotor downwash effects on surfaces and tail rotor)
Model Library
- Blade element and Momentum theory rotor models for main and tail rotors
- Weight and balance
- Programmable Generic Control System
- Autopilot (add-on)
- Engine and Drive Train
- Turbine Engine (add-on)
- Constant RPM Engine
- Freewheeling clutch for engine and drive train
- Multiple Engines
- Engine start-up procedures
- Fuselage and Stabilizers
- Ground Interaction, Skids and Wheels
- inclined surface landing/takeoff
- ship deck landing/take off
- Wind and turbulence model
- Slung Loads (add-on)
Design Tools
- Rime and Virtual Flight
Other
- Control loading system interfaces
- C++ Fast Trim API
Electronic Warfare and Weapon Support
- EWAWS weapon and missile loads
- EWAWS onboard RADAR
- EWAWS countermeasures including flares, chaffs, jammers and towed decoys